拉格朗日乘子法、罚函数法、乘子罚函数法
本文共 4717 字,大约阅读时间需要 15 分钟。
本文简单总结一些相关概念,具体证明以后再补充;
1. 拉格朗日乘子法 2. 罚函数法:外罚函数与内罚函数法 3. 广义乘子法
1. 拉格朗日乘子法
1.1 无约束问题
无约束问题,定义为 minf(x)minf(x), 对于凸函数而言,直接利用费马定理,f′(x)=0f′(x)=0,获得最优解;
1.2 等式约束问题
等式约束定义如下:
minf(x)s.t.g(x)=0minf(x)s.t.g(x)=0
现在利用拉格朗日乘子法,合并式子:
L(x,a)=f(x)+ag(x)L(x,a)=f(x)+ag(x)
对 x,ax,a 分别求偏导:
∇xL(x,a)=f′(x)+ag′(x)=0∇aL(x,a)=g(x)=0∇xL(x,a)=f′(x)+ag′(x)=0∇aL(x,a)=g(x)=0
发现第二个式子刚好是其约束条件;
为什么?
现在,我们在平面内投影函数,画出f(x)f(x)的等高线,以及g(x)=0g(x)=0的边界线;如图示: 蓝色虚线代表了f(x,y)f(x,y)的等高线;红色代表g(x,y)=c=0g(x,y)=c=0;回顾: 1. 方向导数是各个方向上的导数 2. 偏导数连续才有梯度存在 3. 梯度的方向是方向导数中取到最大值的方向,梯度的值是方向导数的最大值(垂直方向) 假设f(x)f(x)的最小值在圆心处,即梯度方向向外;g(x,y)g(x,y)的梯度方向向下; 那么满足条件的值一定是两个函数相切处;如果相交,那么一定还存在一个等高线与红线相切,而且更小;在切点处,两个函数的梯度共线,即f′(x)=−ag′(x),a<0f′(x)=−ag′(x),a<0;做简单的变换后:f′(x)+ag′(x)=0f′(x)+ag′(x)=0,这就是第一个等式啦,同时还需要满足第二个式子;
1.3 不等式约束问题(KTT条件)
不等式约束问题:
minf(x)s.t.g(x)=0h(x)<=0minf(x)s.t.g(x)=0h(x)<=0
引入拉格朗日函数:(KTT 条件)
L(x,a,b)=f(x)+ag(x)+bh(x)s.t.g(x)=0bh(x)=0L(x,a,b)=f(x)+ag(x)+bh(x)s.t.g(x)=0bh(x)=0
这样就将不等式约束变成了等式约束,偏导等于零即可求得最优参数;
minf(x)等价于minxmaxa,bL(x,a,b)minf(x)等价于minxmaxa,bL(x,a,b)
对偶变换后有:
maxa,bminL(x,a,b)maxa,bminL(x,a,b)
因为 h(x)<0h(x)<0 ,所以只有当 bh(x)=0bh(x)=0 时, L(x,a,b)L(x,a,b) 才能取得最大值;否则不满足条件;所以KTT条件是 minf(x)minf(x) 的必要条件;
补充:SVM 满足KTT条件:在边界上的点,有h(x)=0h(x)=0;非边界处,令b=0;
1.4 拉格朗日乘子法问题
当 目标函数的Hess矩阵不正定时(特征值不全为正,或者行列式不为正,那么此时的偏导为0处,并不能确定是否是极值点),所以无法求解;
例子:
求解{ minf=2x2+y2−2xys.t.x+y=1{minf=2x2+y2−2xys.t.x+y=1我们定义 L(x,y,λ)=f−λg(x)=2x2+y2−2xy−λ(x+y−1)L(x,y,λ)=f−λg(x)=2x2+y2−2xy−λ(x+y−1) 求偏导可得:⎧⎩⎨⎪⎪⎪⎪∂L∂x=4x−2y−λ=0∂L∂y=2y−2x−λ=0∂L∂λ=x−y−1=0{∂L∂x=4x−2y−λ=0∂L∂y=2y−2x−λ=0∂L∂λ=x−y−1=0我们可以计算原目标函数的Hess矩阵: A=⎡⎣⎢∂2L∂x2∂2L∂y∂x∂2L∂x∂y∂2L∂y2⎤⎦⎥=[4−2−22]A=[∂2L∂x2∂2L∂x∂y∂2L∂y∂x∂2L∂y2]=[4−2−22]正定矩阵; 再看一个目标函数,方程稍作修改:{ minf=2x2+y2+3xys.t.x+y=1{minf=2x2+y2+3xys.t.x+y=1直接求偏导,发现方程无解; 再看其Hess矩阵: B=[4332]B=[4332]非正定矩阵; 也就是说,在梯度为零处,我们无法判断是否是极值;
2. 罚函数法
2.1 定义
罚函数法:根据约束条件的特点,构造出惩罚函数,然后加入到目标函数中,将其转化为无约束问题;新目标函数的解与原始目标函数解一致;
2.1.1 等式约束的罚函数法:
{ minf(x)s.t.gi(x)=0{minf(x)s.t.gi(x)=0
我们引入一个增广目标函数:
minF(x,σ)=f(x)+σP(x)P(x)=gTgminF(x,σ)=f(x)+σP(x)P(x)=gTg
这里: σσ 是惩罚因子,取很大的正数, F(x,σ)F(x,σ) 是罚函数, σP(x)σP(x) 是惩罚项;
惩罚项的性质:
1. 当xx为可行解时,P(x)=0P(x)=0,惩罚项为0;
2.当xx不在可行域内,此时σP(x)σP(x)会很大,那么求得minF(x,σ)minF(x,σ)必然有minf(x)minf(x)与minx,σ[σP(x)]minx,σ[σP(x)]同时成立;所以,当σσ充分大时,增广目标函数的最优值接近于原始问题的最优值;(σ→∞σ→∞,若原问题有解(F<∞F<∞),则会有g=0g=0)
例如:
minf(x)=(x1+x2)2s.t.g(x)=x1+x2=cminf(x)=(x1+x2)2s.t.g(x)=x1+x2=c构造罚函数为:minL(x,σ)=minf(x)+σ||g(x)||22minL(x,σ)=minf(x)+σ||g(x)||22σσ设置的值较大;第一部分优化解,第二部分使得解在可行域内; 如果x不在可行域内,需要我们大步迭代;
2.1.2 不等式约束的罚函数法:
{ minf(x)s.t.hi(x)>=0{minf(x)s.t.hi(x)>=0
此时我们构造惩罚项;
(1) P(x)=∑[min(0,hi(x))]2P(x)=∑[min(0,hi(x))]2 ,可以简单分析出:当 hi(x)>=0hi(x)>=0 时 P(x)=0P(x)=0 ,满足条件;当不在可行域内时,我们需要加大惩罚;
(2) P(x)=∑αih2iP(x)=∑αihi2 ,其中 αi={ 0,hi>=01,hi<0αi={0,hi>=01,hi<0
2.1.3 一般形式的罚函数法:
⎧⎩⎨⎪⎪⎪⎪⎪⎪minf(x)s.t.gi(x)=0hi(x)>=0{minf(x)s.t.gi(x)=0hi(x)>=0
那么罚函数为:
P(x)=∑[gi(x)]2+∑[min(0,hi(x))]2P(x)=∑[gi(x)]2+∑[min(0,hi(x))]2
特别注意:惩罚因子是充分大的数,拉格朗日乘子是一个确定的参数,意义不一样;(当惩罚因子过大时,在求解极小值的过程中,Hess矩阵变成病态矩阵?)
2.2 外罚函数法
对不在可行域内,加大惩罚;上文介绍的就是外罚函数法;
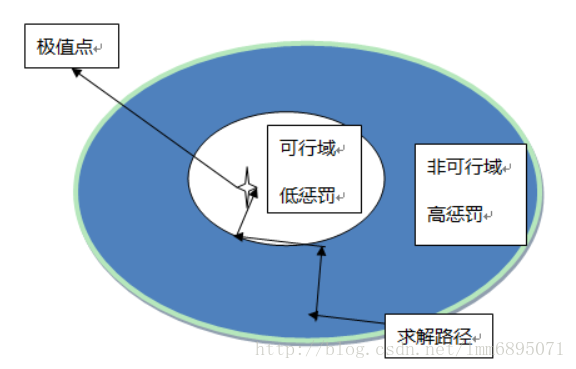
2.3 内罚函数法
又称障碍函数法,内点法);在可行域内筑起高墙,迫使值在可行域内,目标函数无法穿越;(只适用于不等式约束)
障碍函数一般取:(1)倒数 (2)对数 障碍因子为很小的正数 当xx趋于边界时,那么障碍函数趋于无穷;初始点在可行域内部; 在可行域内时,障碍函数值很小,增广目标函数与原始目标函数等价了;

3. 广义乘子法
3.1 等式约束广义乘子法:
{ minf(x)s.t.gi(x)=0{minf(x)s.t.gi(x)=0
广义乘子法是 拉格朗日乘子法与罚函数法 的结合;
ϕ(x,λ,σ)=f(x)+λTg(x)+12σgT(x)g(x)ϕ(x,λ,σ)=f(x)+λTg(x)+12σgT(x)g(x)
在罚函数的基础上增加了乘子项,首先在 σσ 足够大的基础上,获得 ϕϕ 的极小值,然后在调整 λλ 获得原问题的最优解;
迭代公式如下 :
梯度等于零: ∇xϕ(xk,λk,σk)=0∇xϕ(xk,λk,σk)=0 ,即
∇xf(xk)+λk∇xgT(xk)+σk∇xgT(xk)g(xk)=∇xf(xk)+∇xgT(xk)(σkg(xk)+λk)=0∇xf(xk)+λk∇xgT(xk)+σk∇xgT(xk)g(xk)=∇xf(xk)+∇xgT(xk)(σkg(xk)+λk)=0
令 λk+1=σkg(xk)+λkλk+1=σkg(xk)+λk ,则导出拉格朗日乘子法的一阶必要条件;
∇xf(xk)+λk+1∇g=0∇xf(xk)+λk+1∇g=0
计算方法:
(1)初始值设置: x,λ,σx,λ,σ
(2)计算梯度为0,获得当前最优值 xkxk ,然后判断是否终止;
(3)是否调整惩罚因子,获得 σk+1σk+1
(4)计算 λk+1=σkg(xk)+λkλk+1=σkg(xk)+λk
3.2 不等式约束广义乘子法:
思想是:引入松弛变量,化不等式问题为等式约束;
{ minf(x)s.t.hi(x)>=0→{ minf(x)s.t.hi(x)=βi{minf(x)s.t.hi(x)>=0→{minf(x)s.t.hi(x)=βi
那么原始问题转化成:
minx,λϕ(x,λ,σ)=f(x)+λT(h(x)−β)+12σ(h(x)−β)T(h(x)−β)minx,λ,σ,βϕ(x,λ,σ,β)=f(x)+σ2((h+λσ−β)2−(λσ)2)β=1σmax{ 0,σh+λ}minx,λϕ(x,λ,σ)=f(x)+λT(h(x)−β)+12σ(h(x)−β)T(h(x)−β)minx,λ,σ,βϕ(x,λ,σ,β)=f(x)+σ2((h+λσ−β)2−(λσ)2)β=1σmax{0,σh+λ}
首先计算关于 ββ 的极小值;因为 β>=0β>=0 ,上式是关于 ββ 的二次函数,开口向上,对称轴是 h+λσh+λσ ,
β={ 0h+λσh+λσ<0h+λσ>=0→1σmax{ 0,σh+λ}β={0h+λσ<0h+λσh+λσ>=0→1σmax{0,σh+λ}
这样做的目的是:保证增广目标函数最优解近似于原始问题最优解;
分析:当 σh+λ>=0σh+λ>=0 时, β=h+λσβ=h+λσ ,则
ϕ(x,λ,σ)=f(x)−σ2(λσ)2=f(x)−λ22σ∇xϕ(x,λ,σ)=∇xf(x)ϕ(x,λ,σ)=f(x)−σ2(λσ)2=f(x)−λ22σ∇xϕ(x,λ,σ)=∇xf(x)
当 σh+λ<0σh+λ<0 时, β=0β=0 ,则
ϕ(x,λ,σ)=f(x)−σ2(λσ)2+(σh+λ)22σ=f(x)−λ22σ+(σh+λ)22σ∇xϕ(x,λ,σ)=∇xf(x)+(σh+λ)∇h(x)ϕ(x,λ,σ)=f(x)−σ2(λσ)2+(σh+λ)22σ=f(x)−λ22σ+(σh+λ)22σ∇xϕ(x,λ,σ)=∇xf(x)+(σh+λ)∇h(x)
梯度为零计算最优解,发现刚好满足朗格朗日乘子法的必要条件;
3.3 一般约束广义乘子法:
混合等式不等式约束法,计算即可。
https://blog.csdn.net/lmm6895071/article/details/78329045?locationNum=7&fps=1
你可能感兴趣的文章
使用sklearn做单机特征工程
查看>>
Python 多线程技巧 用threading.Event代替time.sleep()
查看>>
工具】Cmake与gcc的关系
查看>>
struct中长度为0的数组用途与原理
查看>>
svm笔记
查看>>
C++ 继承&多态
查看>>
C++多继承的观察和7点体会(都是实用派的观点) good
查看>>
python socket编程详细介绍
查看>>
高人对libsvm的经典总结(全面至极)
查看>>
Linux下c语言多线程编程
查看>>
火狐下easyui1.3.*弹出window框定位不到中间解决把办法
查看>>
Hadoop启动报错NoClassDefFoundError: javax/activation/DataSource解决方案
查看>>
Python爬虫来啦,抓取数据导出到excel,简单明了,强大,直接贴代码
查看>>
Docker拉取镜像失败报错Error response from daemon: Get https://registry-1.docker.io解决办法
查看>>
IO操作的工具类总结
查看>>
对指定文件或目录进行压缩和解压缩的工具类总结
查看>>
Java中如何遍历Map对象的4种方法
查看>>
图片延时加载例子详解
查看>>
js获取url参数值的两种方式详解
查看>>
java中System.getProperty()方法详解
查看>>